UDSLib. Engineered Safety
Mechanics use Unified Diagnostic Services (UDS) to talk to cars and vehicles. It’s how they read fault codes, update firmware, and recalibrate sensors. I got familiar with the protocol while working on Telematics devices made by Proemion. We were doing updates od the devices, and I learned that manufacturers do not care about following the standard, but more about following their tools.
After learning UDS internals I built UDSLib to enforce safety by design and release process.
Source Code: github.com/w1ne/udslib
ISO-14229-1 Compliance
Getting the error codes right is hard. The standard has a strict Negative Response Code (NRC) Priority. If a request is wrong for two reasons (e.g., wrong length AND security locked), you must return the specific error code the standard demands.
UDSLib uses a table-driven dispatcher that follows the rules.
| NRC | Meaning |
|---|---|
| 0x7F | Service Not Supported |
| 0x12 | SubFunction Not Supported |
| 0x13 | Incorrect Message Length |
| 0x33 | Security Access Denied |
| 0x22 | Conditions Not Correct (The Safety Gate) |
Transport Layer, Zephyr vs Bare Metal
UDS is implemented on top of ISO-TP (ISO 15765-2), which handles breaking large messages into CAN frames.
UDSLib uses a Spliced Transport Architecture:
- Native Mode: On Zephyr, it uses the kernel’s native ISO-TP sockets. Saves RAM and CPU.
- Fallback Mode: On Bare Metal, it uses its own static buffers. It also handles CAN-FD.
Tooling Ecosystem
You can’t fix what you can’t see. I built tools to help me debug it:
- Wireshark Dissector A LUA script that decodes traffic, showing which service logic is executing.
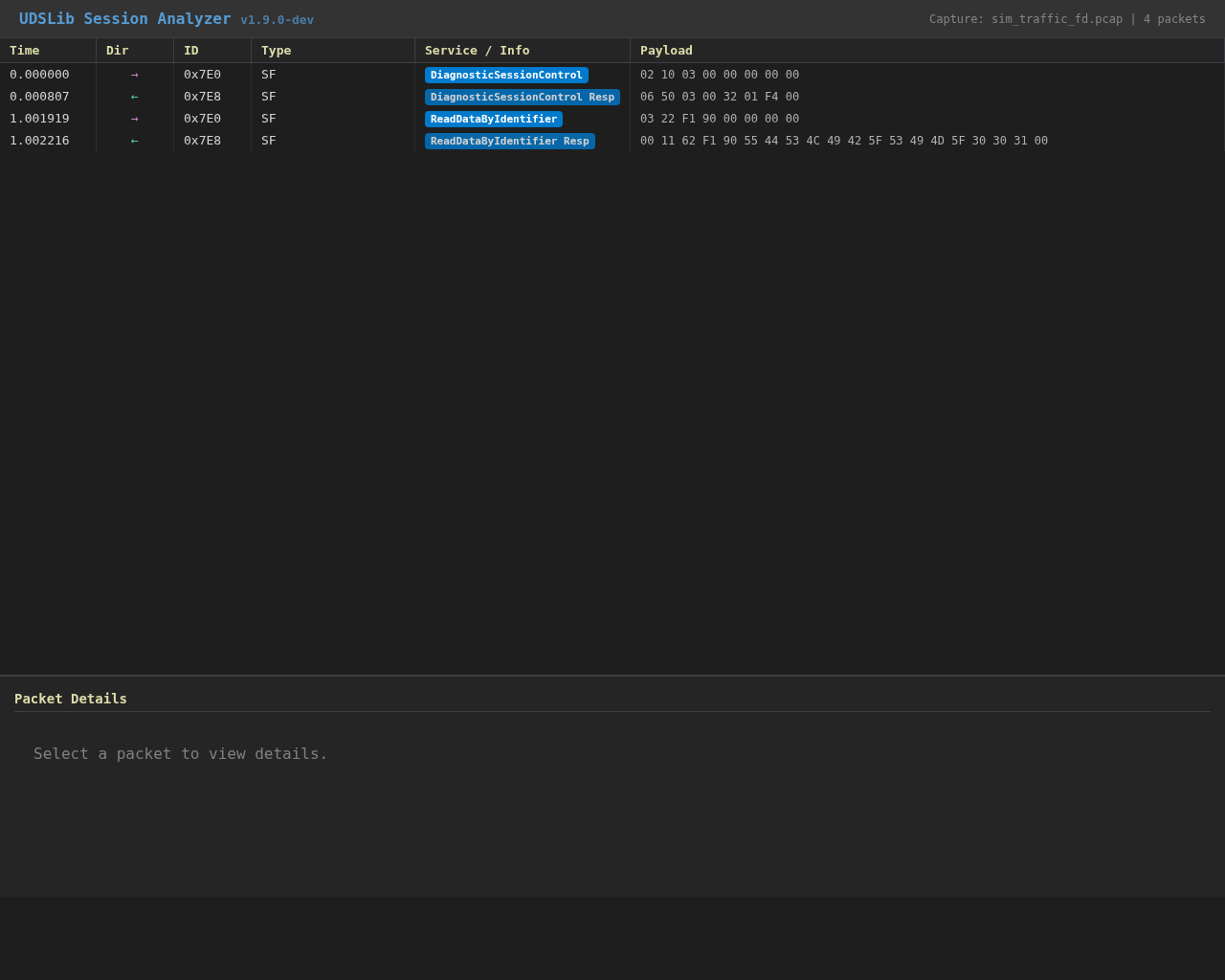
- HTML Dashboard
A log analyzer that generates a visual timeline of the session. It highlights P2 timer violations and security changes.
- Python Bindings
I wrapped the C library with
ctypes, so I can fuzz-test the parser with thousands of malformed packets.
Safety in automotive firmware is about code quality, CI /CD, and architecture. And UDSLib enforces all of them.